
Pix4Dmapper Enterprise4�ƽ���ǹ���ǿ������ȵ���Ӱ����������ʹ���ṩרҵ�����˻���ͼ����Ӱ����������������û��ܹ���Чȷ�Ľ���רҵ���˻���棬��ʹ��Pix4Dmapper֮ǰ���������ֳ���ȡ���ݼ�����ѡͼ��ѡ��������ͼ��ĵ���λ�ú͵�����Ƶ㣨GCP��������Ҫһ���õ����ݼ����Զ�������������ȷ�Ľ������Ϊ������������ݼ������²���������������ܵ��´���ʧ�ܡ�ʹ��֧��ͨ���ֶ��������˻���������IJ�ͬͼ��ͨ����������ʹ��ͼ������þ��������ͼ���������dz��Ŀۣ����ܹ��Զ��Բ�ͬ����ɫ��ʾ����ͬ���ֵ������Ч�����������ʹ������Σ������Խ������������������ܺͻ����������ϣ��Ի����������ս�������������˻�ӳ��רҵ��Ա�Ĺ������̣�ʹ���������ɵĽ�����м��ߵ�ȷ�Ժ������ԣ�֧��ʹ�û���ѧϰ���Զ����Ʒ��࣬�Զ����Ʒ��ࡣʹ��Pix4Dmapper��Ӱ���������༭����Ա��ڼ��㣬ӵ��ƽ����ƽ�����ֱ��棬ʹ��Pix4Dmapper����3Dģ���е����ֱ����Լ����ɲ������棬���룬����߶Ⱥ�ʹ���Ƽ�飬ע�ͺͷ���3D�������ݵļ���ע�Ͳ�������ʹ��Pix4D Cloud���а�ȫЭ�������ȣ����δ��������ƽ�����أ�����Ҫ�����Ѳ�Ҫ�����ˣ�

2��˫��Pix4Dmapper4.5.6.msi���а�װ��ѡ��װλ�ã����next
3����Patch�ļ��У���Block Internet Connection (Copy it to install dir) �ļ����е�version.dll�ļ����Ƶ�������װĿ¼
4��.����Patch�ļ��У�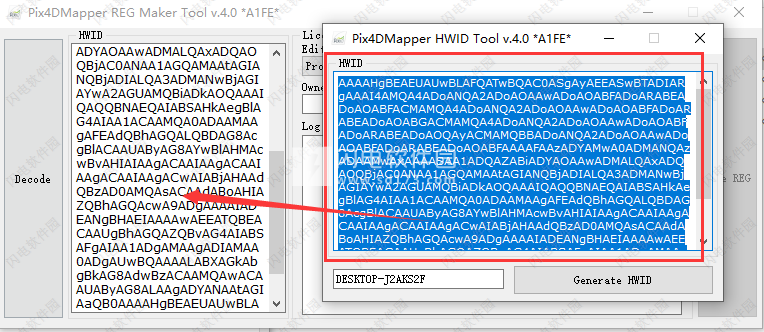
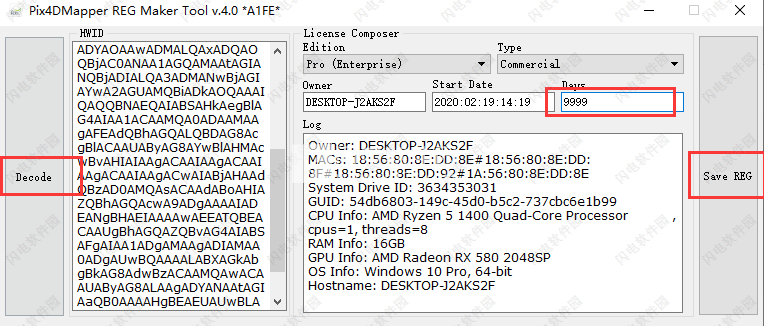
5������������Decode������days���1�ij�9999���ٵ��SAve REG��ť
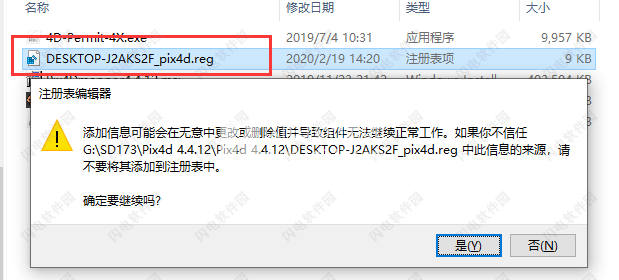
6����ʱ�����ļ����ڻ�����һ��ע����ļ������У���ͼ��ʾ�����Ӻϲ�ע���������-ȷ��
7��������ʹ������֮ǰ������Pix4DTool.exe�������½ǵ�ϵͳ����������Կ���ͼ��

8�����ϲ�����ɺ���Ա������������������ע�ᣬע��ͬ���������
����ͼ��ɼ�
��װ�ƽ�̳�
1���ڱ�վ���ز���ѹ����ͼ��ʾ���õ���������2��˫��Pix4Dmapper4.5.6.msi���а�װ��ѡ��װλ�ã����next
3����Patch�ļ��У���Block Internet Connection (Copy it to install dir) �ļ����е�version.dll�ļ����Ƶ�������װĿ¼
4��.����Patch�ļ��У�
���������HWID.exe��֮����ϵͳ�в鿴�Լ��ĵ��������Ƶ�HWID����ĶԻ����У���� “GENERATE HWID” ������HWID�룬��긴�ƣ���ͼ�������ῴ�豸�����뿴��ͼ��
��Patch�ļ��д� “4D�\Permit�\4X.exe”����һ�����Ƶ�HWID��ճ����HWID���У���������“DECODE” ��ť��ִ�н��룻
��������ұߵ� “SAVE REG” ��ť������ע����ļ���Patch�ļ��У�ע����ļ�������ĵ����������ģ����·���ͼ
5������������Decode������days���1�ij�9999���ٵ��SAve REG��ť
6����ʱ�����ļ����ڻ�����һ��ע����ļ������У���ͼ��ʾ�����Ӻϲ�ע���������-ȷ��
7��������ʹ������֮ǰ������Pix4DTool.exe�������½ǵ�ϵͳ����������Կ���ͼ��
8�����ϲ�����ɺ���Ա������������������ע�ᣬע��ͬ���������
������ɫ
1������
ʹ���κ��������RGB���Ȼ�����ͼ�������ʹ�õ������˻�����ʹ����ѵ�Pix4DcaptureӦ���Զ�ִ�з��к�ͼ�����ݴ��䡣
2�����ֻ�
Pix4Dmapper������ͼ��ת��Ϊ���ֿռ�ģ�͡�ʹ���ƻ�������Ӱ����ƽ̨�촦��������Ŀ��
3������
�����������Ŀ���������������ṩ�������ɽ����Ԥ����У��ϸ��Ϣ�Լ�������Ŀ����ָ�ꡣ
4����������
�������룬������������ȡ�߳��������ݲ�ִ�������顣
���ƶ˹������˻�ӳ������
5�����������
����Ŀ��ͨ���ŶӺ�����ʹ�ñ��ļ���ʽ��ͨ��Pix4D Cloud���߰�ȫ���������Ŷӣ��ͻ���Ӧ��ѡ����ȫ�ع�����Ŀ����
��������
һ�����ֹ��߿�Ϊ����ҵ��Ӧ���ṩ֧��
�������
1�����鼶���
������Ϊ��λ��ý����X��Y����1-2����GSD Z����1-3����GSD
2����ȫ����������Ŀ
�������Ȥ������ѡ����ѡ����ӵ�����Ƶ��༭���ƣ�DSM����������������ˡ�
3�����Ĺ������̣�����ѡ��
ʹ��Ĭ��ģ������Զ�����������ʹ���Զ�����������ȫ�������������ݺ���Ŀ��ѡ���ʱ�Լ����ʹ���ƺ����洦����
����rayCloud
��Ӱ����������ǿ����
��ԭʼͼ�����ӵ�3D�ؽ���ÿ����Ķ��ػ������Կ��ӷ�ʽ��֤�������Ŀ��ȷ�ԡ�
������ȷ��3D��ͼ��ģ�ͣ���ȫ����ͼ��
1���Զ����Ʒ���
ͨ������ѧϰ����������ֶ���
2��չƽ��ƽ�����ֱ���
���������Ը���ƽ��Ȼ��ڹؼ��������ס�
3�����ɲ������棬���룬����߳�
����ȫ�ɵ��Ļ����߶��½���3D������
4������ע��
uԶ�̼����Ŀ��ȷ������ͻ���������ؼ�Ԫ�ء�
5���������
�������Ŷӣ��ͻ����������������ѡ����ȫ�ع�����Ŀ���ݺͼ��⡣
�ġ���Ƭ��
�κ�������κ����˻����κ�ͼ��ֻҪ��.jpg��.tif��
RGBͼ��
���˻�ͼ��
�����ͼ��
��ͼ��
���۾�ͷͼ��
360°���Ӱ��
���װ��ͼ��
ӰƬ
�塢������Ŀ�����Ĺ��ߡ�
���ɽ����ֵ�ͼ��ģ�͵���Ϊ��ҵ���ݸ�ʽ���Խ��н�һ�������档
ʹ�ð���
һ����������
1��������
Pix4Dmapper����Ҫ�����ǿ�����JPEG��TIFF�ļ���ͼ����Ƶ�ļ�Ҳ���Ե��벢���ڴ����������Ǿ�ֹͼ��
���棺������ͼ����Ҫ��ת��༭ͼ����ͼ���ı�����ļ������ԣ������ܽ��ͽ��������
���� ����
.jpg��.jpeg JPEGͼ��
.tif��.tiff ��ɫTIFF
��Ƶ��TIFF��RGB /����/������
1�㣨����������ҳ��
8��10��12��14��16���������
.avi��.mp4��.wmv��.mov ���Ե���Pix4Dmapper����Ƶ�ļ�
2������
Pix4Dmapper�����������������
����������ڲ��������ⲿ������Bingo��SSK������Щ�ļ������������ͼ����ڲ������࣬...�����ⲿ������λ�úͷ���
��ʧ���ͼ��
���ܵ��ƣ�.las��.laz��.xyz��.ply���������ؽ�ģ�͵�һ��3D�㡣X��Y��Zλ�ú���ɫ��Ϣ���洢�����ܵ��Ƶ�ÿ�����ϡ�
���ֱ���ģ�ͣ�Grid DSM��Raster DSM��������ӳ�������2.5 Dģ�ͣ����а�����X��Y��Z����Ϣ������������ɫ��Ϣ��
���ֵ���ģ�ͣ�DTM ��Raster DTM�����������˳����������X��Y��Z����Ϣ����������ɫ��Ϣ�Ķ������罨���֮���2.5Dģ������
Orthomosaic��GeoTIFF��KML�ļ���Google Maps HTML�ļ�����ͨ����ϼ�������Ƭ�Ƴɵ�2Dģ�ͣ���ͼ������ɫƽ�⣬�Ӿ����������á�
����ͼ��GeoTIFF����ɫKML�ļ�������Shapefile����ÿ��������������һ������ͼ�����ڸ�ͼ�ϵ�ÿ�����أ������ص�ֵ���ӹ����ķ�����ͼ�ó���
3D��������.obj��.fbx��.dxf��.ply��.pdf��.osgb��.slpk��������ģ����״�ı�ʾ����ģ���ɶ��㣬��Ե�����ͼ���������ͶӰ�����档���ֺͿ��ӻ�ģ�ͣ�����ģ�Ͳ������ϴ�������ƽ̨������Sketchfab���dz����á�
�ȸ��ߣ�shp��.pdf��.dxf������Щ�����ӵȸߵ���ߡ�����֮�������ã�����Ϊ���ǿ��Ը��õ������ͼ��½�ر������״�����Σ���
��Ƶ������.mp4��.mkv��.avi ��
3D���ֻ��������ߣ����棬������棨.shp��.dxf��.kml��.dgn ��
ͼ���ȡ�ƻ�ȡ���ڣ�
Ҫ�ؽ��ĵ���/��������͡�
����������루GSD������Ŀ���Ҫ���GSD�������������ͼ��ľ��루���и߶ȣ������磬5����GSD��ʾͼ���е�һ�������ڵ��������Ա�ʾ5���ף�5 * 5 = 25ƽ�����ף���
�ص����ص�ȡ������ӳ����ε����ͣ�����������������ͼ������ʡ�
������ͼ��ɼ��ƻ������½����ȷ����ʧ�ܣ�������Ҫ�ٴβɼ�ͼ��
����ʹ��Android��iOS���ṩ�ķ��мƻ�Ӧ�ó���Pix4Dcapture �Զ�ִ���������������з��мƻ���
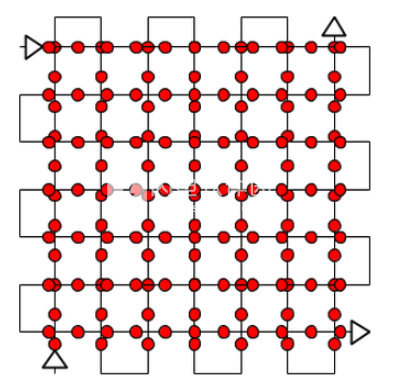
1��һ�����
�ڴ��������£�����ʹ�ù��������ͼ����ȡͼ���Ƽ����ص��������ص�����75��������ڷ��з��������ص�����60�����ڷ��й켣֮�䣩�����Ӧ�����ܱ����ڵ���/�����ϵĺ㶨�߶ȣ���ȷ���ﵽ�����GSD��
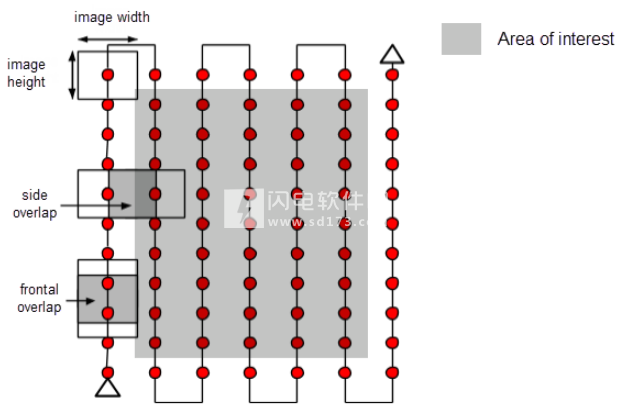
�ص��ͷ��и߶ȱ�����ݵ��ν��е�����
����ɭ�֣�ï�ܵ�ֲ�������ƽ̹�ĵ��κ�ũ����齫�ص��������ӵ�����85���������ص�������70���IJ����ص����ɵø��ߣ��Ա��������ص�ͼ��֮��������ԡ�������ͼ�����Ŀ������Ҫ90��������Ͳ����ص���
���ھ��ж���������Ŀ����ͬ����֮��Ӧ�����ص�������������̫����������������û���½�����ȣ�Ӧ�����ơ�
2����������
���ڽ�������ؽ�������ʹ��Բ�η��мƻ���
��һ����45°��������Ƕ��ڽ�������Χ���С�
�ڽ�������Χ���еڶ��κ͵����η��У������ӷ��и߶Ȳ�����ÿ�ֵ�������Ƕȡ�
����ÿ5��10������һ��ͼ����ȷ���㹻���ص�������ȡ��������Ĵ�С��������ľ��롣���ڽ϶̵ľ���ͽϴ�����壬Ӧ����������ͼ��
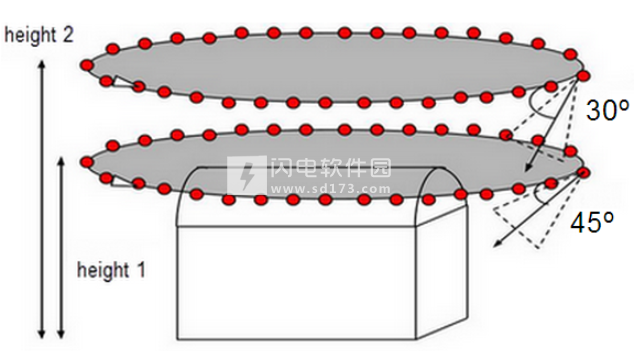
ע�⣺�����к���֮�䣬����߶Ȳ�Ӧ�����������ϣ���Ϊ��ͬ�ĸ߶Ȼᵼ�²�ͬ��GSD��
3�������ؽ�-�ɼ�����ǽ
������3D�ؽ���Ҫ˫������ͼ��ɼ��ƻ����Ա㽨�����������ǽ�����������ϣ�������ͼ���Ͼ��ɼ����ص�����Ӧ��“һ�����”�����е���ͬ��
Ϊ��ʹ��ǽ�ɼ���Ӧ��10º��35º��0°-������£�֮��ĽǶ�����ͼ��
��������ѡ��
��Щ��Pix4Dmapper�п��õ�Ĭ�ϴ���ѡ��ģ�塣����ǿ�ҽ�����ʹ��������Щ������������Ŀ��
����ѡ��ģ�� ����
3D��ͼ
�����3D��ͼ�����ƣ�3D���������Լ�DSM��Orthomosaic���������룺ʹ��������мƻ���ȡ�ĺ���ͼ���������/�ɿ��ԣ��ߡ������ٶȣ�����Ӧ�÷�Χ����ʯ�����ؼ���
3Dģ��
�����3Dģ�ͣ����ƣ�3D���������������룺���и��ص��ȵĿ�����б�����ͼ���������/�ɿ��ԣ��ߡ������ٶȣ�����
�������
����������ʣ������ʣ�����NDVI���������Ӧ��ͼ���������룺���Զ�����������ɼ��Micasense RedEdge��Multispec 4C�ȣ��Ŀ�����͵�ͼ���������/�ɿ��ԣ��ߡ������ٶȣ�����Ӧ�ã�����ũҵ��
���������
����������ʣ������ʣ�����NDVI���������Ӧ��ͼ���������룺�����ĺ��RGB����Ŀ�����͵�ͼ���������/�ɿ��ԣ��ߡ������ٶȣ�����Ӧ�ã�����ũҵ��
��RGB
������������ˡ��������룺����ũҵ��RGB�����ͼ��ɼRGB�����������/�ɿ��ԣ��ߡ������ٶȣ�ƽ����Ӧ�ã�������죬����Ҫ��ȷũҵ��
3D��ͼ-����/�ͷֱ���
����ش���3D��ͼģ�壬���������ɼ����ݼ����������������/�ɿ��ԣ��͡������ٶȣ��졣
3Dģ��-����/�ͷֱ���
����ش���3Dģ��ģ�壬���������ɼ����ݼ����������������/�ɿ��ԣ��͡������ٶȣ��졣
Ag�������-����/�ͷֱ���
Ag������� ģ��ĸ��촦���������������ɼ����ݼ����������������/�ɿ��ԣ��͡������ٶȣ��졣
Ag RGB-����/�ͷֱ���
����ش���Ag RGBģ�壬���������ɼ����ݼ����������������/�ɿ��ԣ��͡������ٶȣ��졣
������
������ȷ�����ͼ���������룺�����ǣ�����Tau 2��FLIR Vue Pro��FLIR XT�����������/�ɿ��ԣ��ߡ������ٶȣ�����Ӧ�ã���ȿ��ƣ�̫���ܵ�ذ壬��������
ThermoMAP���
������ȷ�����ͼ���������룺��thermoMAP����������͵�ͼ���������/�ɿ��ԣ��ߡ������ٶȣ�����
���������أ���֪����ѹ���룿�Ź�ע���ĺ�"��������"��ȡ
�������ڸ������°� ���ղ����أ���Ȩ��������վ������кš�ע���롢ע������ƽⲹ���Ⱦ����Ի�����������ѧϰ����֮�ã��������غ�24Сʱ��ɾ����


















